
The turning point came from changing where the rendering work was performed.
In the original architecture, the GIS database provided vector geometries, but the server-side rendering stack transformed them into PNG raster tiles before sending them to the client. Every display request, including requests coming from remote browsers, ultimately depended on the embedded platform itself performing software rasterization.
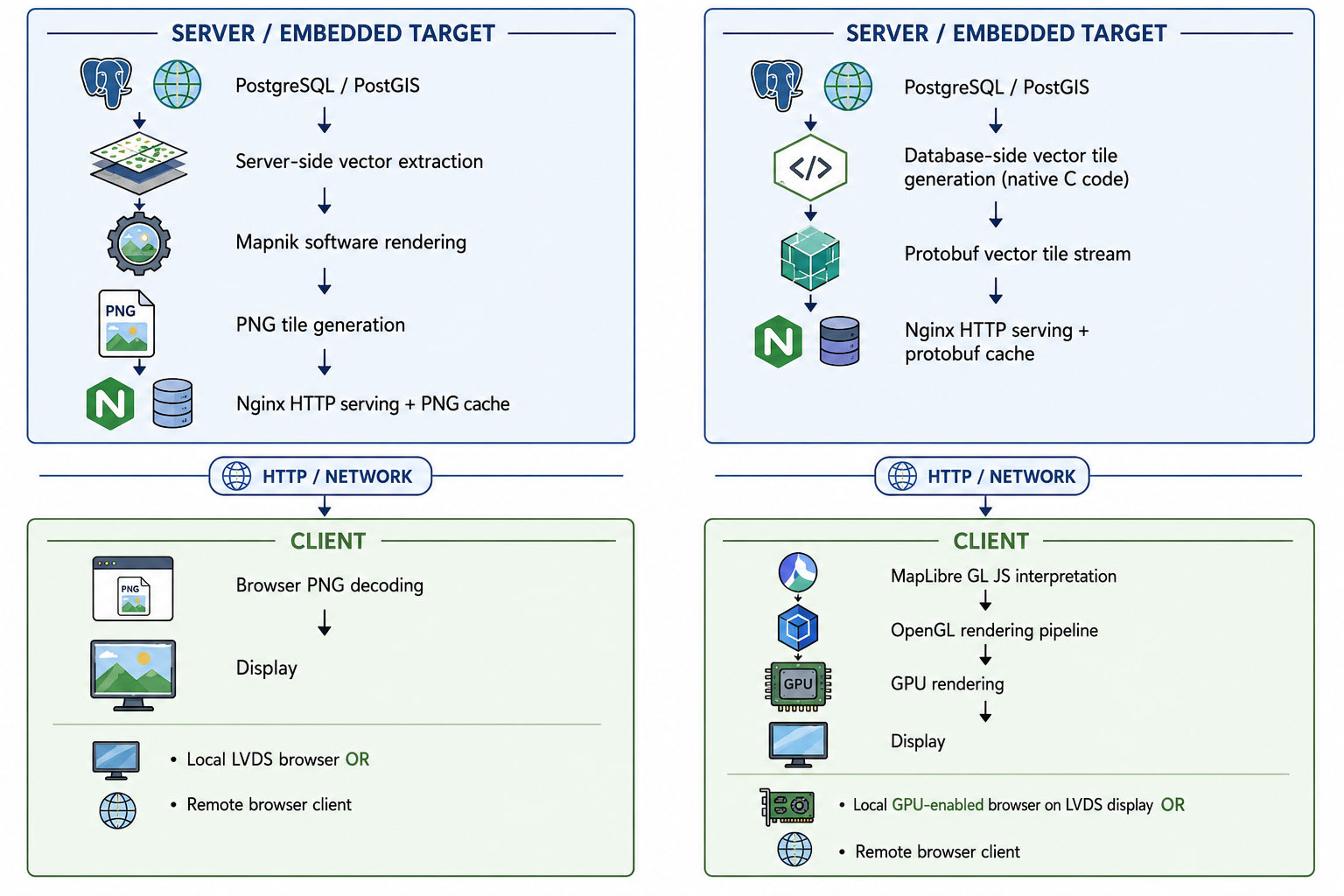 In the redesigned architecture, the database no longer fed a software rasterizer. Instead, it directly generated compact protobuf vector tiles from the GIS queries themselves.
In the redesigned architecture, the database no longer fed a software rasterizer. Instead, it directly generated compact protobuf vector tiles from the GIS queries themselves.
This is an important distinction because the vector tile generation process is handled entirely inside the database layer and relies on highly optimized native C code rather than a custom application-side rendering loop.
The protobuf stream is sent over to the network (possibly on localhost), then consumed by a JavaScript rendering engine running on the client, typically MapLibre GL. The engine interprets the vector tile content, applies the rendering style, and builds the corresponding OpenGL rendering description of the visible map features.
On the local display, the final rendering stage is then handled by a GPU-enabled display client. This may be a standard browser in kiosk mode such as Chromium, or a lighter C++ wrapper feeding the GPU directly and pushing the resulting image toward the LVDS display pipeline.
The rendering chain therefore became significantly shorter and more direct.
The important point is that the project did not simply replace PNG files with another transport format. The architecture moved from server-side software rasterization toward database-side vector tile generation and GPU-assisted client rendering.
This changed the behavior of the entire platform.
