The initial implementation deliberately followed the traditional OpenStreetMap rendering model. This was not only the most natural starting point, but also a very reasonable engineering decision.
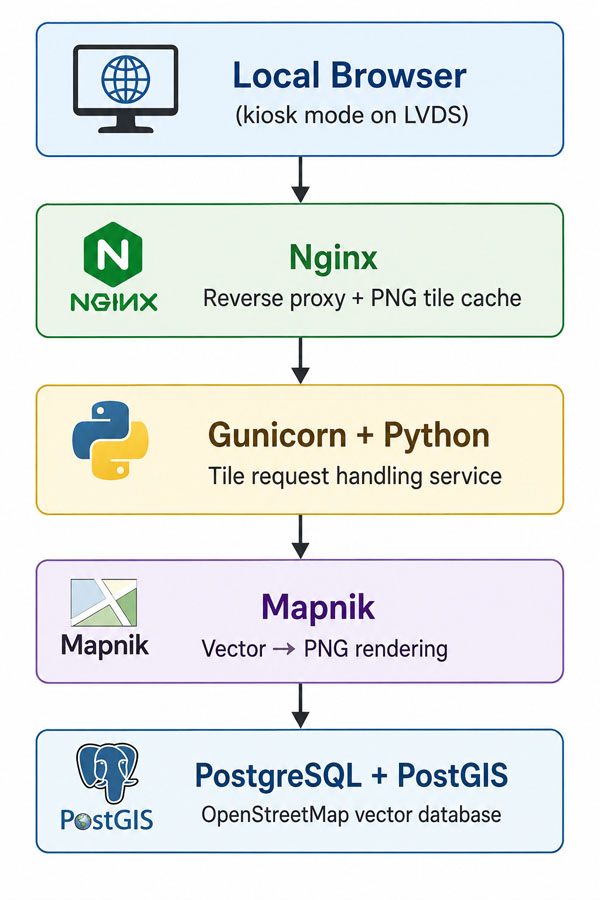
At the core of the platform sat a geographic database built around PostgreSQL and its spatial extension PostGIS. Railway infrastructure data extracted from OpenStreetMap remained stored as vector geometries inside the database, preserving both semantic information and scalability across zoom levels.
Rendering relied on Mapnik, one of the historical rendering engines of the OpenStreetMap ecosystem. A lightweight Python service executed through Gunicorn handled incoming tile requests, queried the database, invoked Mapnik, generated PNG raster tiles, and returned them over HTTP.
The resulting architecture remained surprisingly compact considering the scale of the problem.
Most of the heavy lifting was delegated to mature existing components rather than custom code.
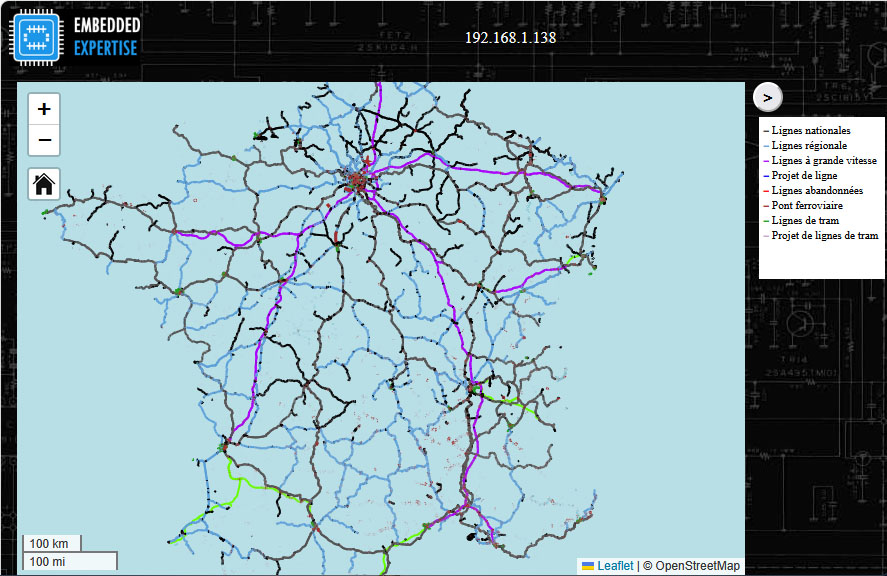
The user interface itself intentionally remained very simple. A standard browser running locally in kiosk mode handled map navigation on the LVDS display, while remote users accessed the exact same interface through the onboard network.
This brought an important practical benefit: the entire visualization stack could rely almost entirely on standard web technologies.
One of the most elegant aspects of the traditional OpenStreetMap architecture lies in its tile-based rendering model.
Instead of rendering the entire map continuously, the world is divided into small raster images corresponding to fixed geographic areas and zoom levels. As the user pans or zooms, the browser simply requests the missing tiles on the move.
This approach transforms rendering into a highly cacheable problem.
Once generated, a tile becomes a reusable static asset. The rendering cost is paid once, then amortized through repeated reuse.
This is where Nginx became extremely valuable.
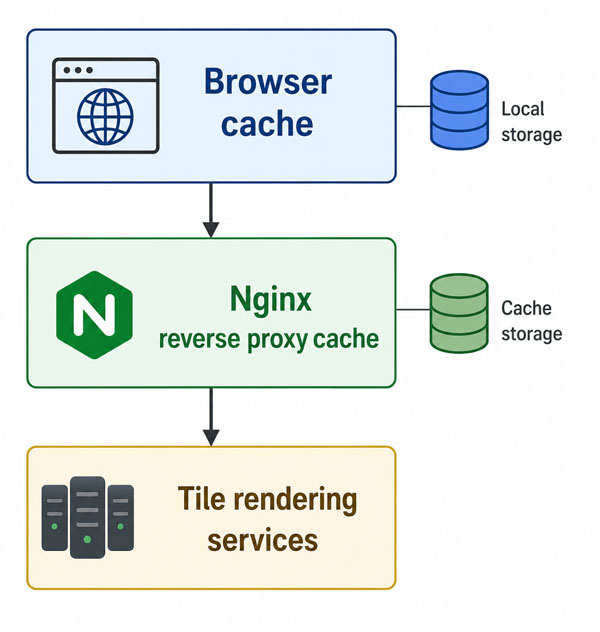 Acting as a reverse proxy with aggressive disk-backed caching, Nginx stored rendered PNG tiles locally and served them directly on subsequent requests without invoking the rendering engine again.
Acting as a reverse proxy with aggressive disk-backed caching, Nginx stored rendered PNG tiles locally and served them directly on subsequent requests without invoking the rendering engine again.
From an engineering perspective, this architecture is remarkably clever. It exchanges expensive rendering operations for comparatively cheap storage operations.
And in practice, it worked very well.
Once tiles had been generated and cached, redisplay became almost instantaneous. Areas already visited once felt highly responsive to all clients, even on embedded hardware.
Another interesting aspect of the project was the relatively small amount of application-specific code involved in the final system.
Most of the platform relied on existing infrastructure components. PostgreSQL/PostGIS handled spatial storage and indexing, Mapnik handled rendering, Nginx handled caching and HTTP serving, while the browser engine itself handled display and interaction.
This did not mean the project was trivial. Quite the opposite.
Although the amount of custom code remained limited, significant engineering effort went into configuring, integrating, tuning, and adapting these components to an embedded environment. Rendering styles, spatial queries, tile generation behavior, cache policies, storage layout, browser interaction, and overall system responsiveness all required careful work.
But importantly, the project did not attempt to reinvent an entire GIS rendering stack from scratch.
Instead, it leveraged mature components already optimized and battle-tested by the broader OSM ecosystem, then adapted them carefully to the realities of embedded hardware.